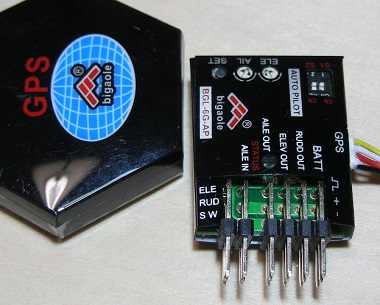
bogaole 6G-AP 簡易GPS
○ 特記
簡易オートパイロットって何?
-- GPSモードではAILEとELEVの舵をGYROが持ち(ニンゲンから100%奪い取り)、
-- 送信機のスティックでは動かせなくなります
-- そこが一番オートパイロットぽいところだと思います
GPSモードの地点はどうやって決めるの?
GPSモードのときの高度はどうなるの?
-- 下に書きます。
GPSユニットをGYROに接続した場合(with GPS)のGPS有り動作と、
GPSユニットを切り離した場合(without GPS)のGPS無し動作とに
大きく分かれるようですが、ここではGPS有り動作についてだけ書きます。
(GPSを接続しない「without GPSモード」は試していません)
(以前にコネクタが固着されていて外せない模様と書きましたが、外せました)
水平モードとGPSモードがあります。
Normalモードはありません。3D・AVCSモードはありません。
☆ Self balance 水平(維持)モードのエレベータは注意です
ELEVについて、このモードを持つGYROに共通の注意
☆ GPSモードは他に類を見ない特色があります。
GPSモード用に、あらかじめ1地点を設定します。(「定点1」とします)
希望する場所に実際にGYROを持って行きます。
そこでGYROのボタンの長押し操作をして、その地点をGYROに記憶させます。
(ということで、実際に踏み込める場所にしか定点を設定することができません)
説明上、記憶させた地点を「定点1」とします。
飛行中にGPSモードに切り替えると
高度は、切り替えた時点での高度をGYROが維持しようとします。
(モード切替を行った途端に、一時的に「ガクン」と高度を失うことがあります)
飛行コースは、まず、切り替えた時点での場所から、
GYROが定点1に戻るコースをとります。
GPSモードに切り替えられた地点から、定点1に向かって飛行します。
次に、定点1を通り過ぎると、その後は定点1をほぼ中心にして
その周りを周回するような飛び方をします。
円の半径は、販売店の説明にもあるとおり、50〜100(m)とかなり大きな円になります。
試してみるときれいな円にはならず、その都度いびつな形の回り方をします。
ただ、高度の維持については、かなり優秀だと思います。
GPSモードの間は、AILEとELEVは人間の手を離れます。(←ドキドキっ)
GYRO任せで、送信機では動かせません。スティックを動かしても反応しません。
GYROはAILEとELEVの舵を切って周回飛行を続けます。
GYROがRUDDの舵を切ることはしません。RUDDは中立のままです。
RUDDとTHROは送信機で動かすことができます。
人間がRUDDを動かすとGYROが自動で目指すコースを邪魔することになります。
THROはGYROとは無関係です。
当然、GPSモード中でも人間が操作して適切な推力を保つ必要があります。
GPSユニットとの関係確立と、GYROセンサの校正を一度は行う必要があるようです。
DIP SWitchふたつを特定の位置にして電源を入れることで、セッティングモードに入ります。
まず、GPSユニットとGYRO部の関係確立が自動で行われます。LED表示で完了を確認します。
GYROセンサの校正はGYRO表面のボタンの長押しで行います。LED表示で完了を確認します。
説明書では "it means autopilot calibration is successful" とだけ記載されています。
推測するに、水平維持モードのAILE・ELEV軸の校正のことなのでしょうか。
感度調節は、GYRO作用の向き、GYRO Direction の指定を兼ねてVRで行います。
VRは各舵ごとに分かれています。
AILE、ELEVのふたつのVRがあります。
・記事1
販売店の掲載写真ではGYROとGPSユニットの間のケーブルがカールコードのように
見える例がありますが、手元にあるものはストレートコードでつながっています。
・記事2
主観ですが、水平維持モードは、他のたとえばEAGLEのものなどに比べて、AILE・ELEVともに
かなりガンコに水平維持しようとする感じです。送信機のスティックがあまり反映されません。
GYROとニンゲンが舵を取り合う、奪い合っているような印象を受けました。
もう少しニンゲンの意思を反映してくれてもいいと思います。
EAGLE A3・A3 Super だと水平維持モードで着陸するのも一興ですが
このGYROの水平モードでの着陸は、怖いと感じたので試していません。
(単に当方の積み方が悪いとかいろいろで、性能を引き出せていないのかも知れません)
(傾き45度制限などとして働いているのかも知れませんが、不明です)
・文句1
赤いLED表示が1灯あります。これがどのモードでも同じ表示をします。
水平モードでも、GYRO OFFでも、GPSモードでも赤の点滅で同じです。
表示でモードの確認ができません。これは扱いづらいです。
・イチャモン1
このGYROはRUDDに作用を及ぼしません。
どのモードでもGYROがRUDDの舵を切ることはありません。
GYRO Direction と感度の調節を兼ねたVRは、AILEとELEVの分ふたつしかありません。
また、どのモードでもRUDDは送信機のスティックを反映します。
ならば、RUDDはGYROを経由しなくていいと思うのですが、入力と出力があります。
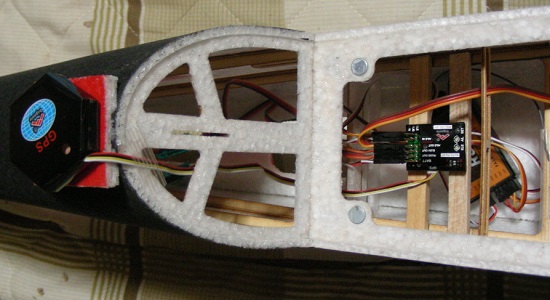
○ 試した機体
1. HobbyKing MX2 EPP
2. ホクセイモデル 48インチ Sbach342 EPP

○ 各事項
・販売店
world models系、ROBINなど多数
・悪い点
AILE 1in,1out。
GPSモードでの周回の半径が50〜100(m)と大きい
正面積みに限られる。
水平モードはELEVが不安定。
Normalモードがない。
GPS用の定点を決めるためには、実際にそこに持って行ってボタンを操作する。
(マップのクリックで設定したり座標数値で調節することはできない。)
モータ(THRO、ESC)のコントロールはない。
GPSモード中にGYROによる自動周回を維持するために、操縦者が適切に
モータ出力を調節し続けていなければならない。
・良い点
GPSモードがユニーク。
GPSモードでは設定点を中心に周回しようとする。
・LINK
maker
http://www.bglmodel.com/